前言
理解不对的地方欢迎斧正。
nimble的时钟管理主要由以下文件组合实现:hal_timer.c、hal_timer.h、、os_cuptime.h、os_cuptime.c、board.c、npl_os_rtthread.c、nimble_npl.h。
目录
1. 总览
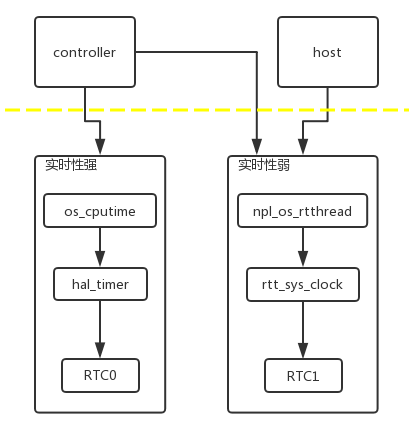
rt-thread和nimble需要用到两类定时器服务:实时性强和实时性弱。
实时性强:
- controller:需要软件完成实时性和优先级都最高的蓝牙基带内容,如:时间片分配,同步anchor、丢包重发机制等,这时RTC0的中断优先级应该全局最高。
实时性弱:
- controller:链路层的控制过程,这些对于实时性要求弱。
- rt-thread:需要一个系统时钟,这里用RTC1提供时间片。
- host:需要用到定时服务叫callout,callout使用rt-thread的一个软件定时器实现(callout在npl_os_rtthread.c文件中实现)。
NOTE:之所以不用Systick而是RTC提供rt-thread系统时钟是因为ble对功耗有要求,RTC功耗更低。
2. controller
2.1. hal_timer.c & hal_timer.h
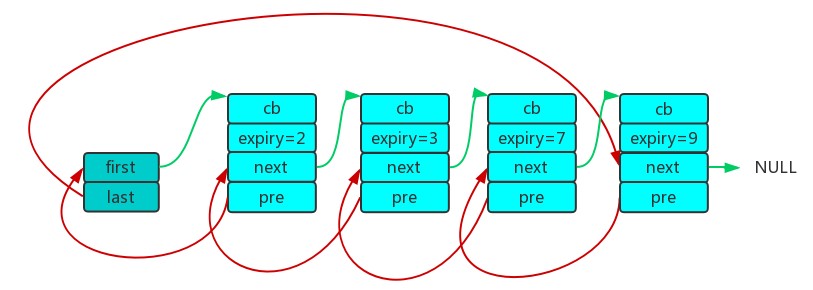
基于RTC0和链表实现了软件定时器的功能,即维护一条链表:链表第一个元素即是将要到达的超时事件,第二个为晚一点的超时事件,第三个更晚一点的超时事件。
hal_timer如果有读不明白的地方,可以参考下面两个小节的提示。
2.1.1. RTC0计时技巧
每次RTC0溢出(有效范围bit0~bit23),tmr_cntr += 0x1000000,即通过
unsigned int tmr_cntr变量来扩展只有24bit的RTC。定时器应用可以抽象出这么一种情景,即存在两个时刻,一个为目标时刻,另一个为实时时刻,需要比较这两个时刻谁先谁后。而实时时刻是一直在增加的变量,所以会存在溢出情况,则涉及实时时刻存在溢出情况,与目标时刻比较谁先谁后问题。这里用参考资料的time_after和time_before的方式巧妙解决。
2.1.2. RTC0中断处理函数
- RTC溢出
- 需要进入中断更新计时变量tmr_cntr,若屏蔽这个中断,则无法知道RTC究竟跑了多长时间。
- COMPARE置位
- 当需要延时的时间< 3 tick时候,人工置位COMPARE标志位触发中断
- 当需要延时的时间≥ 3 tick时候,设置CC寄存器,硬件自动置位COMPARE标志位触发中断。
每次进入RTC0中断都会更新计时变量tmr_cntr,然后判断下一个即将要到达的超时事件事件是否< 3 tick,若成立,则立马调用下一个即将要到达超时事件的cb,否则将CC设置为下一个超时事件的时间。
2.2. os_cputime.c & os_cputime.h
基于hal_timer简单封装的一层。
3. host
3.1. board.c
1 | 简化伪代码 |
- 配置lfclk时钟(提供RTCx的时钟源)。
- 根据设置的rt-thread系统时钟频率来配置RTC1的compare值
- 每次compare中断将rt-thread系统时钟tick++
- 设置下一个compare值
NOTE:需要注意RTC0也依赖lfclk时钟。
3.2. npl_os_rtthread.c
该文件主要定义一个简单的事件驱动机制:callout
该组件由定时器、事件、事件队列组成,这些功能在不同平台都具有共性,所以可以抽象出来接口。
callout广泛运用在host中,在controller也有,具体在后面再介绍。
4. 总结
时钟抽象分层工作做的很不错,起码时钟这一块需要移植到其他os的东西很清晰。
